
Tento postup je určen pro produkt CAMWorks.
V následujícím tipu bude popsáno, jak využít funkce Rozšířených nájezdů a odjezdů ve frézovacích operacích. Tato funkce je dostupná pouze pro soustružnicko-frézovací stroje. Tato funkce tedy není zpřístupněna pro frézovací a soustružnické stroje.
Tuto funkci naleznou uživatelé na kartě NC v 2.5osých a 3osých operacích.

Obecně slouží uživateli k přesnějšímu nastavení pohybů stroje, ke kterým dochází před a po obrábění pomocí frézovacích operacích, většinou se tedy jedná o pohyby před a po výměně nástroje. Na těchto složitějších strojích je potřeba tyto pohyby kontrolovat kvůli tomu, aby se uživatel vyhnul případným nechtěným kolizím.
Využití rozšířených možností nájezdu a odjezdu
Běžný pohyb najetí a vyjetí je v operaci řízen pouze pomocí Roviny rychloposuvu, Předjížděcí roviny a Roviny posuvu a samotného nastavení najetí/vyjetí. Na obrázku je viditelné výchozí nastavení operace obrysového frézování na výstupku pomocí poháněného nástroje na soustružnicko-frézovacím stroji.

- Vzdálenosti rozšířených odjezdů a nájezdů v osách X a Z se určují v parametrech stroje, na kartě Postprocesing (X, Z Preset…). Názvy proměnných se mohou lišit dle Vašeho postprocesoru.

- Možnost rozšířeného najetí/vyjetí přidává další možnosti před najetí a po vyjetí nástroje. Pro použití a definici, zaškrtněte na kartě NC políčko Použít rozšířené možnosti nájezdu a odjezdu a klikněte na tlačítko Definovat.

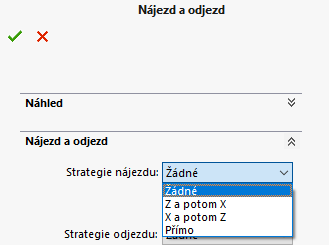
- V panelu Nájezd a odjezd naleznete Strategie Nájezdu a Odjezdu.
- Vzdálenost jednotlivých pohybů lze nadefinovat několika způsoby:

- Přednastavení – absolutní XZ: byla definována v předchozích krocích v parametrech stroje. V tomto případě X = 125 mm a Z = 125 mm u operací na hlavním vřetenu.
- Bezpečný index: Lze nadefinovat přímo zde, ve výchozím nastavení X = 250 mm a Z = 250 mm.
- Obojí: Součet obou předchozích.
- Další parametry:
- Automatická oprava: Pokud by docházelo u zadaných pohybů ke kolizi mezi nástrojem a polotovarem/součástí bude tato dráha automaticky opravena.
- Bezpečný prostor: Tento bezpečný prostor by měl nástroj při zadaných pohybech dodržovat automaticky kolem aktuálně obrobeného polotovaru.

- Příklad: Strategie nájezdu – X a potom Z, Strategie odjezdu – Přímo.

